| ������|�й��������̨|��վ��ͼ |
| �ͷ���Ϊ��ҳ |


��̸ | ֱ�� | �㳡 | ����ǽ | ���а�
• ���Ӵ��������ʶ�� • ���ؼ�ʮ����ȫ����
������Ŀ|
̽��������|
�ټҽ�̳|
������Ȼ|
����|
���
ԭ�����|��������|�����й�|��Ȼ����
��ѧ���磨��ͣ����| �ٿ�̽�أ���ͣ����| ���´��| �Ƽ�����
�߱��й�| �߽���ѧ| ��ɫ�ռ�| �Ƽ�֮��
�Ƽ�����| ��������| �л�����| ����
��֤������| ��֤��Ӱ��־| �ط�| ��֤������֮��
������| ������̸¼| ˿·����| �����DZ���
��������| �����ձ�| ��������| �����л���
�����й�| ����| ����֮��ɫ����| ��ת����
ֲ��|����|��ս|����|����|����|ʷ˵����|���ĵ���|�ܵ�|ʱ��|����̽��|�й��ʵ�|���պ���|��Ȥ|��ÿƼ�|�峯|��ʷʱ��|������|UFO|�Ļ�����|��¥��|����|����|�ղ�|��������|Ů��Ů��|Ů��|�Ƶ�|����|�˶�|��Դ����|����|��������|����|��������|����|��ʷ����|�ڽ�|����̽��|����|ר��|����|��ѧ̽��|�������|δ��֮��|����|����|����|���Ҵ�ʦ|����Ѱ��|��������|ս��|��Ȼ����|��ѧ|��������|�¼�|��������|�����¼|�ż���ַ
| �ײ� |
|
|
| �ز� |
|
|
����������Ƽ�Ѷ ����ʱ��12��1����Ϣ��Ӣ��ÿ���ʱ������������ѧ�Ŀ�ѧ�ҽ����з���һ��ɱ��ε��������ˣ�����ͨ�����ܵĹؽڿ�϶Ť��������Ŀǰ��չ��������������������Ƚ��Ļ�����ģ�͡������������������������ͺ��ǣ��������ܹ��ı�������״�ƶ����ܶԵ��������dz�������ã��ɴ�Խ��С��϶չ��Ӫ�ȹ�����
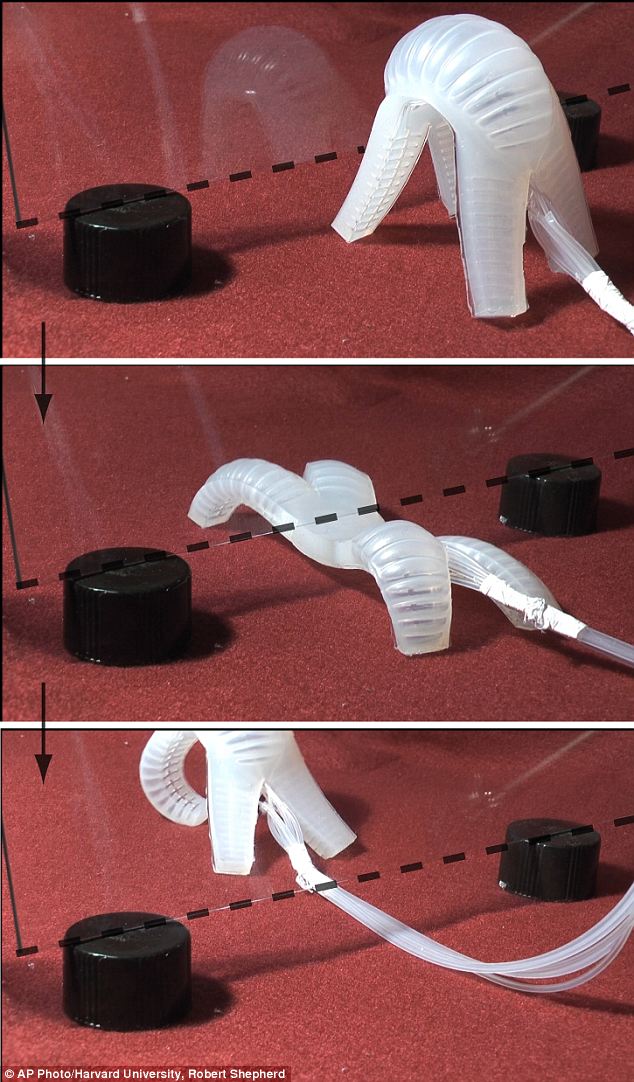
������������ܹ��������ͻ������Ť�����䶯�Դ�����С�Ŀ�϶��
�������ǻ������ڵ�����Ҫ��ս�أ���������˶��صı��μ���ʹ��������ǰ����ͳ������������ʺϵ�ս�ء�
��������������������Ĵ�ѧ��ר��С���Ѿ�չʾ��һ��ëë����̬�Ļ����ˣ������ɹ����Ƴɣ��ܹ������������Լ���ǰ����������Լ5Ӣ�糤��12.7���ף�����֫ͨ����֫��������ֶ���ͨ�����Գ���ʵ�ַֿ����ƣ���ʹ�û������˶��dz�������������л������ѻ��С�
������ѧ������M��������˹����Ŀ�����Ա�����˻����˵�����ԣ����ǿ��ƻ�����ͨ���䶯��һ��ֻ��0.75Ӣ�磨1.875���ף�����Ƭ���洩������ѧ�����ò�ͬ���˶���ʽ��ϲ��ݸ���������˴��������С�Ŀ�϶15�Σ��������������˴�����϶��ʱ�䲻��һ���ӡ�
������Ȼ��������Ҳ����ȱ�ݡ����������ⲿ��Դ����ѧ�ұ����з��µķ�ʽ���ϵ�Դʹ�����ܹ�����ʵս��
�������ڻ�÷¡��ѧ���������ʵ���Ҹ����ˡ��������о�ѧ�߿�÷��-��������Ϊ�����µĻ����˾��о�Ĵ����ԣ���ʹ���ǽ�����֮ǰ�о��ɹ��Ļ����ϡ�������/�������ǣ�
�ȴʣ�
����㲥������̨ �й��������̨ ��Ȩ����
Υ���Ͳ�����Ϣ�ٱ� ��ICP֤060535�� �����ġ�2014��0383-083��
���ϴ���������Ŀ����֤�� 0102004 �³���֤��������098�� �й�������������Ŀ�������ɹ�Լ